Maximum power under full control
In 1977, Emotron was the first company to introduce an AC drive based on Pulse Width Modulation (PWM). Further developments led to one of the first market launches of AC drives with direct torque control in 1998.
The Emotron technology has an extremely fast response time since actual and required torque is compared 40,000 times per second. The AC drives can provide the highest possible torque per ampere from a normal industrial motor, offering the option of controlling a motor without a rotor sensor while still maintaining control of torque and speed.
Direct torque control eliminates disturbances
The direct torque control method, invented by Depenbrock and Takahashi, offers highly efficient control of dynamic and demanding applications. The Emotron technique reacts quickly to peak loads, abrupt load changes or inaccurately set ramp times. This is invaluable in, for example, crane control where frequent and critical starts and stops demand instant high torque or in crusher applications where speed quickly needs to be adjusted to the type or size of material.
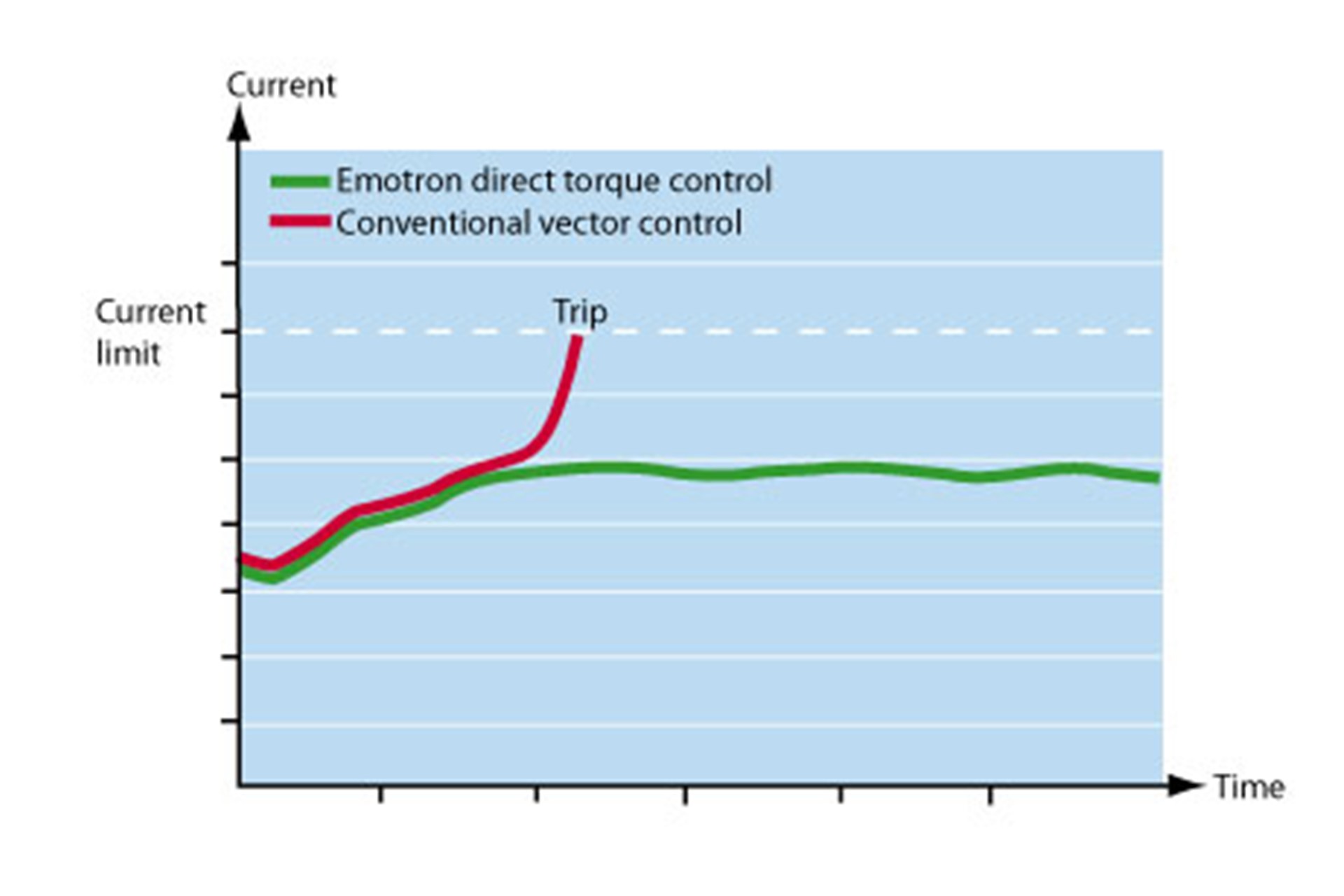
Peak torque up to 400 %
By measuring the motor current and voltage, the motor's torque and speed can be controlled continuously and with exact precision in real-time. Emotron AC drives are based on direct control of the magnetic flux and the torque of the connected electric motor. The high accuracy of the flux and torque estimator makes it possible to increase the peak torque of the motor to up to 400% of nominal torque, even at 0 rpm. To achieve such high torque, the AC drive must match the required current.